Blog’umun ilk yazısında, Elektronik konusunda minik minik bilgiler vereceğimden bahsetmiştim. İlk yazım şu ana nasipmiş.
Bu yazımda 74HC14 entegresinden bahsedeceğim.
 14 bacağa sahip olan 74HC14 entegresi bir Hex Inverting Schmitt Trigger ‘dır. Peki bu ne demektir? Hex, altı demek. Bu entegrenin 14 bacağı var demiştik. Birisi Vcc, Birisi toprak, 6 tanesi giriş, 6 tanesi de çıkış(Hex = 6 demiştik!) toplam 14 oldu. Inverting’in ise kelime anlamı terslemektir. Yani 1’i 0 yapar, 0’ı da 1 yapar. Schmitt Trigger ise belli bir değerin altını 0, üstünü ise 1 kabul etmesidir. (Kaynak)
14 bacağa sahip olan 74HC14 entegresi bir Hex Inverting Schmitt Trigger ‘dır. Peki bu ne demektir? Hex, altı demek. Bu entegrenin 14 bacağı var demiştik. Birisi Vcc, Birisi toprak, 6 tanesi giriş, 6 tanesi de çıkış(Hex = 6 demiştik!) toplam 14 oldu. Inverting’in ise kelime anlamı terslemektir. Yani 1’i 0 yapar, 0’ı da 1 yapar. Schmitt Trigger ise belli bir değerin altını 0, üstünü ise 1 kabul etmesidir. (Kaynak)
Continue reading 74HC14 – Hex Inverting Schmitt Trigger
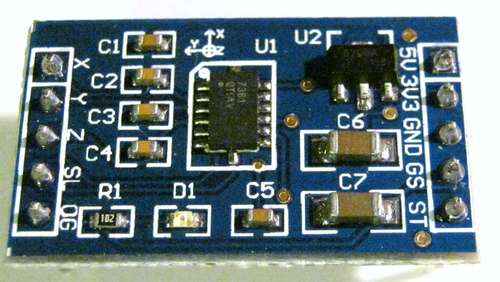
 İlk yazıda kısaca MMA7361 İvmeölçer Modulünü tanıtmıştım. Bu yazımda Arduino ve İvmeölçer modülünü kullanarak eğim bilgisini bilgisayara göndereceğiz. İlk önce gerekli bağlantıları yapalım.
İlk yazıda kısaca MMA7361 İvmeölçer Modulünü tanıtmıştım. Bu yazımda Arduino ve İvmeölçer modülünü kullanarak eğim bilgisini bilgisayara göndereceğiz. İlk önce gerekli bağlantıları yapalım.